������Ȋw�U��@���e�L�X�g1��
��1�́@���{�b�g����
���P�@�v���O�����̊�b
����쐬���郍�{�b�g�́C���B�X�g��������Ђ�Robovie-MS�ł��D���̃��{�b
�g�����̂ɕt���̃A�v���P�[�V�����͂���܂����C�����ł̓v���O��������
�����ē������܂��D
�@�v���O�����́CExcel��VBA�iVisual
Basic for Applications�j���g���čs��
�܂��D
�E ![]() �c�[���o�[�iVisual Basic�j�̕\��
�c�[���o�[�iVisual Basic�j�̕\��
�c�[���o�[�́u�\��(V)�v�̒��̃c�[���o�[(T)
���CVisual Basic�Ƀ`�F�b�N�����܂��D
�E Visual Basic Editor�̕\��
�c�[���o�[�iVisual Basic�j���CVisual Basic Editor��
�\�������܂��D
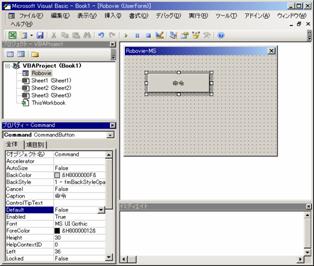 ����ɁC���[�U�[�z�[����lj�
����ɁC���[�U�[�z�[����lj�
���܂��D
�I�u�W�F�N�g�����uRobovie�v
Caption���uRobovie-MS�v��
���܂��D
����ɁC�R�}���h�{�^�����P��
�t���܂��D���̃R�}���h�{�^��
�̃I�u�W�F�N�g�����uCommand�v
Caption���u���߁v�Ƃ��܂��D
�܂��C�V���A���ʐM�̃{�^��
![]() �iMSComm�j���t���܂�.
�iMSComm�j���t���܂�.
�E �ʐM�v���O����
VBA��MSCOMM�R���g���[�����g���āC���{�b�g�ƒʐM�����܂��D�����ł̒ʐM�́C
RS-232C�Ƃ����V���A���̒ʐM�K�i���g���܂��D
����P���@�ʐM�K�iRS-232C�ɂ��āC���ׂ�D
����P�� �ʐM�v���O����
 If MSComm1.PortOpen = False Then
If MSComm1.PortOpen = False Then
�@�@�@
MSComm1.CommPort = 1
�eCOM�ԍ�
�@�@�@ MSComm1.Settings = �g38400,N,8,1�h �e�ݒ�p�����[�^
�@�@�@ MSComm1.PortOpen = True
�e�|�[�g���J��
End If
�� �I�u�W�F�N�g�̃��\�b�h�ƃv���p�e�B
 MSComm1�̃v���p�e�B��PortOpen��True�ɂ���ƃ|�[�g���J����ĒʐM
MSComm1�̃v���p�e�B��PortOpen��True�ɂ���ƃ|�[�g���J����ĒʐM
�ł����ԂƂȂ�D
�E �T�[�{���[�^����
Robovie-MS�ɂ́C�r��6�C�r��10�C���1��
�v17�̃T�[�{���[�^�������Ă��܂��D
�����������Ƃɂ�胍�{�b�g�����܂��D
����Q�� �T�[�{���[�^�����v���O����
![]() MSComm1.Output =�g@0030:P1T0068:�`���`:P1T00a5::�h & Chr(10)
MSComm1.Output =�g@0030:P1T0068:�`���`:P1T00a5::�h & Chr(10)
�� MSComm1�̃v���p�e�B��Output�ɕ�����������邱�Ƃɂ��
�T�[�{���[�^�����܂��D
�u@0030:�v�ɑ���P1T0068�Ɠ��͂���Ƒ�1�T�[�{���[�^���C
![]()
![]() ��]���܂��D�i P1T00�̕����́C�K���������Ɓj
��]���܂��D�i P1T00�̕����́C�K���������Ɓj
�T�[�{���[�^�́C�R�����u:�v�ŋ���Ďw�肵�܂��D
������Ȋw�U��@���e�L�X�g2��
�E �����p���̐ݒ�
�@�@Robovie-MS�͍ŏ��ɏ����p����ݒ肵�C��������̍����Ƃ��ăT�[�{���[�^
����]�����܂��D
�����l�̎擾�́CRobovie-MS�ɕt���̃A�v���P�[�V�����ł���RobovieMaker
�o�[�W����2���g���C���̃\�t�g�Ń��{�b�g�̏����̎p����ݒ肵�C�ۑ���
�܂��D�ۑ��t�@�C�����́C�udef.ini�v�ł��D
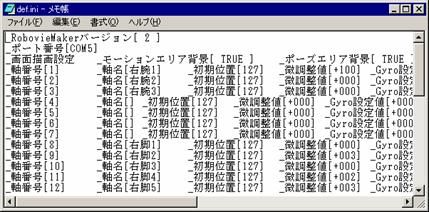
�@�@�@�@�@�����ʒu�́C���ׂ�127�ƂȂ��Ă��܂��D����ɔ������l�����������̂�����
�p���ƂȂ�C�T�[�{���[�^�͂��̈ʒu�ɉ�]���܂��D
�E �T�[�{���[�^�̏���
���ԍ���1�`28�܂ł���܂����C���ۂɎg���Ă��鎲�ԍ���17�ł��D

�E 16�i���ւ̕ϊ�
Excel�̊��Ƃ��āC10�i����16�i���֕ϊ�����DEC2HEX()�Ƃ�����������܂����C
�c�[��(T)�̒��ɂ��镪�̓c�[��(D)���g�����Ԃɂ��Ă����K�v������܂��D
����16�i���ɕϊ������������MSComm1.Output�ɑ�����܂��D
������鏑���́C����Q�����Q�Ƃ��Ă��������D
�E Excel�̃��[�N�V�[�g�̊��p
�����p���̃f�[�^��T�[�{���[�^����]�����鐔�l�́C���[�N�V�[�g�ɋL�q���C
�v���O�����ł������舵���܂��D
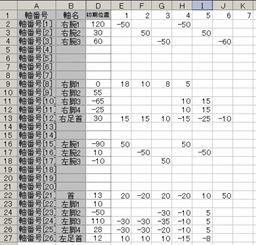
����R�� ���[�N�V�[�g�ւ̋L�q�i�V�[�g���uRobovie�v�j
 �@�@�@�@�@�@�@�@���[�N�V�[�g��
�@�@�@�@�@�@�@�@���[�N�V�[�g��
�����ʒu�Ɣ������l
�@�@�@�@�@�@�@���\�i���œ��͂��C
�@�@�@�@�@�@�@����������������
�@�@�@�@�@�@�@��16�i���ɕϊ���
�@�@�@�@�@�@�@�܂��D
�@�@�@�@�@�k�v���O������l
 Sub Robovie()
Sub Robovie()
�@�@�@�@�@�@ If MSComm1.PortOpen = False Then
�@�@�@�@�@�@MSComm1.CommPort = 5
'COM�ԍ�
�@�@�@�@�@�@MSComm1.Settings =
"38400,N,8,1"
'�ݒ�p�����[�^
�@�@�@�@�@�@MSComm1.PortOpen =
True
'�|�[�g���J��
�@�@�@�@�@�@ End If
�@�@�@�@�@s$ = "@0030": h$
= "P1T00"
For k = 1 To 28
s$ = s$ & ":" & h$ & Sheets("Robovie").Cells(k + 1, 7)
Next
MSComm1.Output = s$ & Chr(10)
End Sub
�����K1���@���[�N�V�[�g�֔������l����͂��C���{�b�g��������Ԃ̎p���ɂ�����D
������Ȋw�U��@���e�L�X�g3��
�@�E���[�V�����̍쐬
�@�����p�������܂�C���ɂ��̈ʒu����̍����Ƃ��ăT�[�{���[�^����]�����܂��D
���̒l��Excel�̃��[�N�V�[�g�uMotion�v�ɓ��͂��܂��D
�@���̒l��Robovie-MS�ɓ`���ē������܂��D
����S�� ���[�N�V�[�g�ւ̋L�q�i�V�[�g���uMotion�v�j
![�_�`�����o��: �����։�]�����鐔�l��-128�`128�͈̔͂œ��͂���D](roboto1-1.files/image025.gif) �@�@
�@�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���@���͂��鐔�l��[�����ʒu]�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@��[�������l]�������Ď��ہ@�@�@�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�̃T�[�{���[�^�̉�]�l��
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���܂�܂��̂ŁC���ےl��
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@0�`255 �͈̔͂Ɏ��܂���
���Ȃ���Ȃ�Ȃ����Ƃ�
���ӂ���K�v������܂��D
��2�N�̕��K���@4�̃��[�V���������[�N�V�[�g�i�uMotion�v�j�֓��͂��āC
���̒l�����[�N�V�[�g�i�uRobovie�v�j��[�ړ��l]�̃Z���֕��ʂ���v���O������
 �@�@�@�@�@For m = 1
To 4
�@�@�@�@�@For m = 1
To 4
For k = 2 To 29
Sheets("Robovie").Cells(k, 5) =
Sheets("Motion").Cells(k, m + 1)
Next k
Next m
�E���{�b�g�̓�����u�a�`��
�@�@Robovie-MS�́C��x�ɑ���铮�삪4�`5�܂ł�������܂���D����ȏ�̓���
��������ɂ́CRobovie-MS����RS-232C��ʂ��āC�����Ԃɂ���Ԏ���
����Ă���łȂ��Ǝ��̓��삪����܂���D����ɂ��ẮC����ōl��
�邱�Ƃɂ��āC�����4�R�}����������邱�Ƃɂ��܂��D
����T�� ���{�b�g��4�R�}�����������
�@�@�@�@�@�@�@�@���[�N�V�[�g�i�uMotion�v�j��4�̓������͂��C���̓��������{�b
�g�ɂ�����D
�@�@�@�k�v���O������l
 Sub Robovie()
Sub Robovie()
If MSComm1.PortOpen = False Then
MSComm1.CommPort = 5
'COM�ԍ�
MSComm1.Settings = "38400,N,8,1" '�ݒ�p�����[�^
MSComm1.PortOpen = True
'�|�[�g���J��
End If
For m = 1 To 4
For k = 2 To 29
Sheets("Robovie").Cells(k,
5) = Sheets("Motion").Cells(k, m + 1)
Next k
s$ = "@0030": h$ = "P1T00"
For k = 2 To 29
s$ = s$ & ":" & h$ &
Sheets("Robovie").Cells(k, 7)
Next k
MSComm1.Output = s$ & Chr(10)
Next m
End Sub
�����K�Q���@�S�R�}����łP�̃A�N�V�������쐬����D
������Ȋw�U��@���e�L�X�g4��
�����J��Ԃ����Ƃ��āC�u�e�����`�m���������v���w�K���܂������C����
���������ԁC�J��Ԃ����Ƃ��āC�u�c���`�k���������v������܂��D
�@�����Ƃ��āCWhile�i���������ԁj�܂���Until�i���������܂Łj��2
�ʂ�̕��@�Ŏw�肵�܂��D
�@�܂��C�������L�q����ꏊ�Ƃ��āCDo�܂���Loop�̌��2�ʂ肪����܂��D
�@�@�@�@����́CDo�`Loop Until (����)�@���g���܂��D
����U��
Do�`Loop Until (����)
 Sub Test()
Sub Test()
k = 0
Do
�@�@�@�@�@�@�@�@k = k + 1
�@�@�@�@�@�@�@�@Cells(1, k) = k ^ 2
Loop Until k > 9
End Sub
�E���{�b�g�ɃR�}���h�𑗂�
�@Robovie-MS�̓��]�ɂ́C�����̖��߂߂Ă������Ƃ͂ł��܂���D��R�̖��߂�
����ƌ�쓮���N�����܂��D�����h���ɂ́C���߂��t�����Ԃɂ��邩�ǂ���
�ׁC�t�����ԂɂȂ����Ƃ��ɖ��߂𑗂�K�v������܂��D
�@RS-232C��ʂ��āCRobovie-MS�̎����Ԃׂ܂��D
�@�@�@�@���{�b�g�ɁC������":C0000Q00"�𑗂�C���ɁC���{�b�g�̏������܂��D
������������9�Ԗڐ������C���݁C���{�b�g�ɒ~�����Ă���R�}���h�̐���
�Ȃ��Ă���̂ŁC���ꂪ6��菬�����Ȃ����i�K�ŁC�R�}���h�𑗂�悢���Ƃɂ�
��܂��D9�Ԗڂ̕���������o�����߂ɁC����C���������Ƃ���Mid����
�g���܂��D
�@�@�@�@�@���၄�@������S$��5�Ԗڂ̕�������3�̕��������o��
�@�@�@�@�@�@�@�@Mid(S$,5,3)
����V��
���{�b�g���R�}���h�̎����ԂɂȂ�܂ő҂�
 �@�@�@�@�@�@�@String_Num = Len(s$)
�@�@�@�@�@�@�@String_Num = Len(s$)
�@�@�@�@�@�@�@Do
�@�@�@�@�@�@�@MSComm1.Output
= ":C0000Q00" & Chr(10)
�@�@�@�@�@�@Do
 �@�@�@�@�@�@DoEvents
�@�@�@�@�@�@DoEvents
�@�@�@�@�@�@Loop Until
MSComm1.InBufferCount >= 9
�@�@�@�@�@�@Q_Check = MSComm1.Input
�@�@�@�@�@�@QN = Val(Mid(Q_Check, 9, 1))
�@�@�@�@�@�@Loop
Until QN < 6
 MSComm1.Output = s$ & Chr(10)
MSComm1.Output = s$ & Chr(10)
�@�@�@�@�@�@Do
�@�@�@�@�@�@DoEvents
�@�@�@�@�@�@Loop
Until MSComm1.InBufferCount >= String_Num
�@�@�@�@�@�@Trash
= MSComm1.Input
�@�@�@�@�@�@���@MSComm1.Input ��� RS-232C��ʂ��ă��{�b�g����C������i���j
�����D
�@�@�@�@�@�@�@�@Val ��� Value�i�l�j�̗��ŁC�����̕�����𐔒l�ɕϊ�����DVBA��
�v���O�����ł́C���������ł����Ă������Ɛ��l�̋�ʂ�����D
�@�@�@�@�@�@�@�ϐ�QN�ɂ́C���݁C���{�b�g���~���Ă��閽�ߐ�������D���������āC
���ꂪ5�ȉ��ɂȂ�C���̖��߂𑗂邱�ƂɂȂ�D
�����K�R���@Excel�̊e�V�[�g�Ƀ��{�b�g�̊�{������쐬���C���̓����
�@�@�@�g�ݍ��킹�ē������v���O�������쐬����D
�����K�S���@Robovie-MS��Excel�̐}�`�`��܂���Power Point���쐬����D
�@�@�@�@�@�@�@�@�������C�A�j���[�V�������ł���悤�ɍl������D
�T�D�ʐM���@
�@�@�@�@���{�b�g�Ƃ̒ʐM�́CRS-232C���g���čs���܂��D����ɑ���VBA�̃v���O��
���Ƃ��ẮCMSCOMM�R���g���[��������܂����C�t���[�̃v���O����������܂��D
�@���ɁC�؉��@������ihttp://www.activecell.jp/�j�����ꂽEasyComm
���g���āC����V�����������Ă݂܂��傤�D

����P��
EasyComm�ɂ��ʐM
�@�@�@2�̃��W���[���iec.bas�CesDef.bas�j
���C���|�[�g(I)����D
�@�@�@�@�@�@�@�@�{�^���kTestMotion�l���N���b�N����
�@�@�@�@�@�@�@�Ƃ��̃v���O�����D
 Private Sub TestMotion_Click()
Private Sub TestMotion_Click()
�@�@�@�@ec.COMn = 1
�@�@�@ ' COM1���J��
�@�@�@�@ec.Setting = "38400,n,8,1" �@ ' �ʐM�����̐ݒ�
�@�@�@�@ec.Delimiter = "LF"
' ������𑗂����Ƃ���CHR(10)(=LF)��lj�����
�@�@�@�@For m = 1 To 7
�@�@�@For k = 2 To 29
�@�@�@�@Sheets("Robovie").Cells(k, 5) =
Sheets("Motion").Cells(k, m + 4)
�@�@�@Next k
�@�@�@s$ = "@0030": h$ =
"P1T00"
�@�@�@For k = 2 To 29
�@�@s$ = s$
& ":" & h$ & Sheets("Robovie").Cells(k,
8)
�@�@�@Next k
�@�@
String_Num = Len(s$)
�@�@ Do
�@�@ ec.AsciiLine
= ":C0000Q00"
�@�@ Do
�@�@ DoEvents
�@�@Loop
Until ec.InBuffer >= 9
�@�@Q_Check = ec.AsciiLine
�@�@QN = Val(Mid(Q_Check, 9, 1))
�@�@Loop Until QN < 6
�@�@ec.AsciiLine = s$
�@�@Do
�@�@DoEvents
�@�@Loop Until ec.InBuffer >= String_Num
�@�@ec.InBufferClear
�@�@Next m
�@�@ec.COMn = 0
' ���ׂĂ�COM�����
�@�@End Sub
�� �}�j���A���͂�������ł��Ă��܂��̂ŁC�Q�l�ɂ��Ă��������D
���Q�l���k���{�b�g�̊�{�p���l
�@�@�@�@�@�@���{�b�g��������邽�߂̎p��
�Ƃ��ẮC���̊߂ɗ]�T������
����K�v������C�˂������Ă���
�͂��߂ł���D���̃��[�V������
���s����ō�������̂ł���C�s
���S�Ȃ��̂ł���D
�@�@